减少层的“covariate shift”,提出Batch Normalization算法,大大改善了网络训练过程
神经网络训练原则是最小化loss函数,最常用的是mini-batch SGD。虽然SGD简单高效,但是它对调参要求很高,例如学习率以及参数初始化。每一个batch的数据,都是对整个训练集的估计;当输入改变,每一层的输出就会改变,即使前面层改变很小,经过几层处理,很可能放大这个变化。
输入层的改变,引起后面层的改变;这就要求层要不断适应新的数据分布。这种变化叫做“covariate shift”。
如果每层的输入分布都可以固定,那么训练神经网络将会变得简单。为了减少covariate shift,文章提出Batch Normalization算法;该算法不仅可以加速训练过程,还有利于梯度在网络间的传递(减小了梯度关于参数值大小的依赖)。Batch Normalization可以让网络使用更大的学习率,甚至不使用dropout。
Internal Covariate Shift是指网络中激活值得改变(因为神经网络训练过程中参数的改变)。如果可以固定每一层输入的分布,那么可以提升训练速度。例如,可以通过白化,固定好每一层输入的分布,这样就可以减少internal covariate shift带来的影响。
首先想到的是白化每层的激活值,1通过直接修改网络,2或改变激活值依赖的参数。但是这样的修改将会干扰优化算法,导致优化算法是按照Normalization来更新。
要确保对于任何参数值,网络的激活值总是服从期望分布。$x$是输入,$\chi$是整个训练集,那么normalization为:
$$
\hat x = Norm(x, \chi)
$$
不仅仅依赖$x$,还依赖$\chi$。反向传播还要计算
$$
\frac{\partial Norm(x,\chi)}{\partial x} \
\frac{\partial Norm(x,\chi)}{\partial \chi} \
$$
这样的话,白化每一层的输入,计算量很大,要计算
$$
Cov[x] = E_{x\in \chi}[xx^T] - E[x]E[x]^T \
Cov[x]^{-\frac{1}{2}}(x - E[x])
$$
还要计算它们的偏导。上面计算量太大,要寻找一种不需要在每次参数更新时都计算整个训练集的方法。
对整个训练集做Normalization,代价太大,一种容易想到的方法是对一个Mini-Batch做Normalization。一层的输入时d维$\text x = (x^{(1)} \cdots x^{(d)})$,对每一个维度做normalize
$$ {\hat x}^{(k)} = \frac{{\hat x}^{(k)} - E[{x}^{(k)}]}{\sqrt{Var[{x}^{(k)}]}} $$通过上面的白化处理,可以改变数据分布,但是也改变了数据的表达能力。例如使用sigmod作为激活函数,白化操作会使数据分布在“0”附近,即在sigmod线性附近。为了确保变换是“表达能力”方面的等价变换,还要再每一维度引入缩放和平移参数:$\gamma^{(k)}, \beta ^{(k)}$
$$ y^{(k)} = \gamma^{(k)} {\hat x}^{(k)} + \beta ^{(k)} $$这些参数和网络参数一起来学习获得,用来恢复网络表达能力。实际上如果$\gamma^{(k)} = \sqrt{Var[{x}^{(k)}]},\beta ^{(k)} = E[{x}^{(k)}] $就可以恢复出输入的原始值。
上面均值和方差,都是计算一个mini-batch数据获得的,而不是整个训练集。
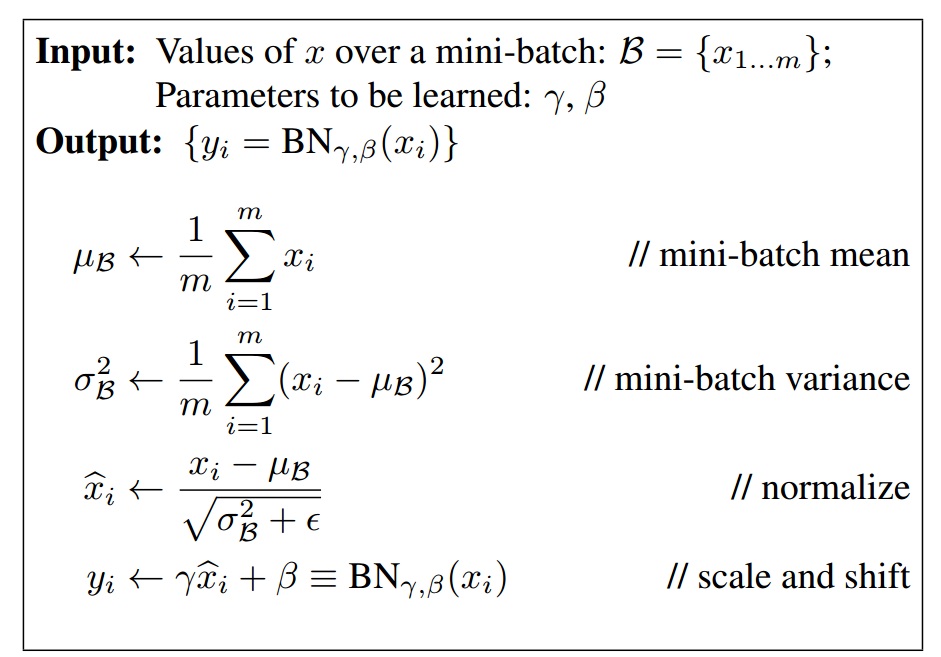
假设一个mini-batch数据有$m$个,去一个维度的数据
$$ \beta = \{x_{1 \cdots m}\} $$经过线性变换得到$y_{1 \cdots m}$,这个变化可以表示为:
$$ \textbf{BN}_{\gamma, \beta} : x_{1 \cdots m} \rightarrow y_{1 \cdots m} $$下面就是Batch Normalization算法过程
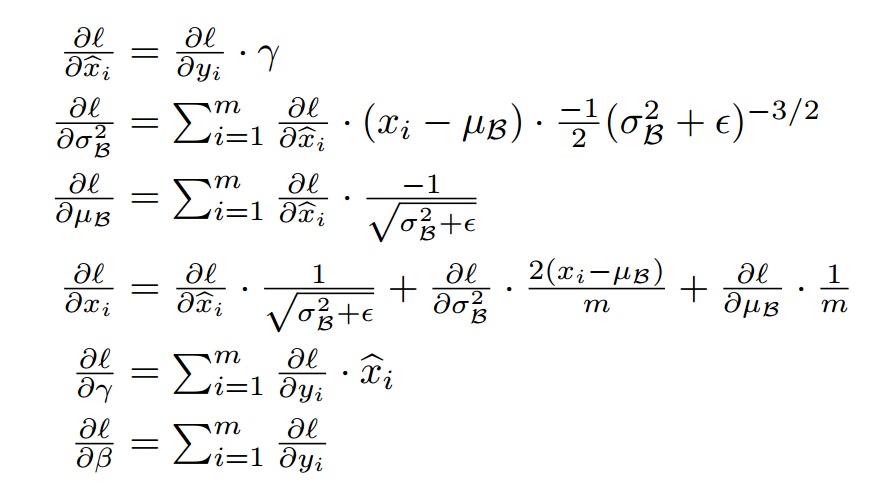
假设$l$为loss,那么反向传播时,链式法则求导为:
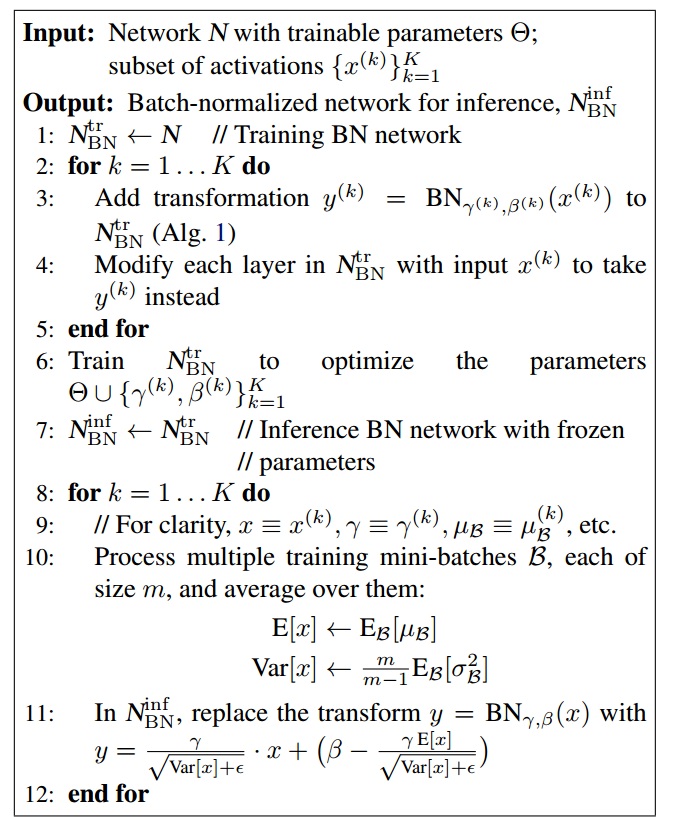
在训练时,使用mini-batch计算均值和方差,在intference时,就要使用无偏估计了,均值估计时无偏估计,但是方差不是,无偏估计的方差为:
$$ Var[x] = \frac{m}{m-1}E_{\beta}[\sigma^2_{\beta}] $$最后可以得到一个完整的Batch Normalization算法